LSTM 结构
一些参数
- 每个时间步 t:
- 输入向量: xt
- 隐藏状态: ht
- 细胞状态(Cell State): ct
- 与普通 RNN 相比,LSTM 额外维护了细胞状态 ct ,可长期存储信息。
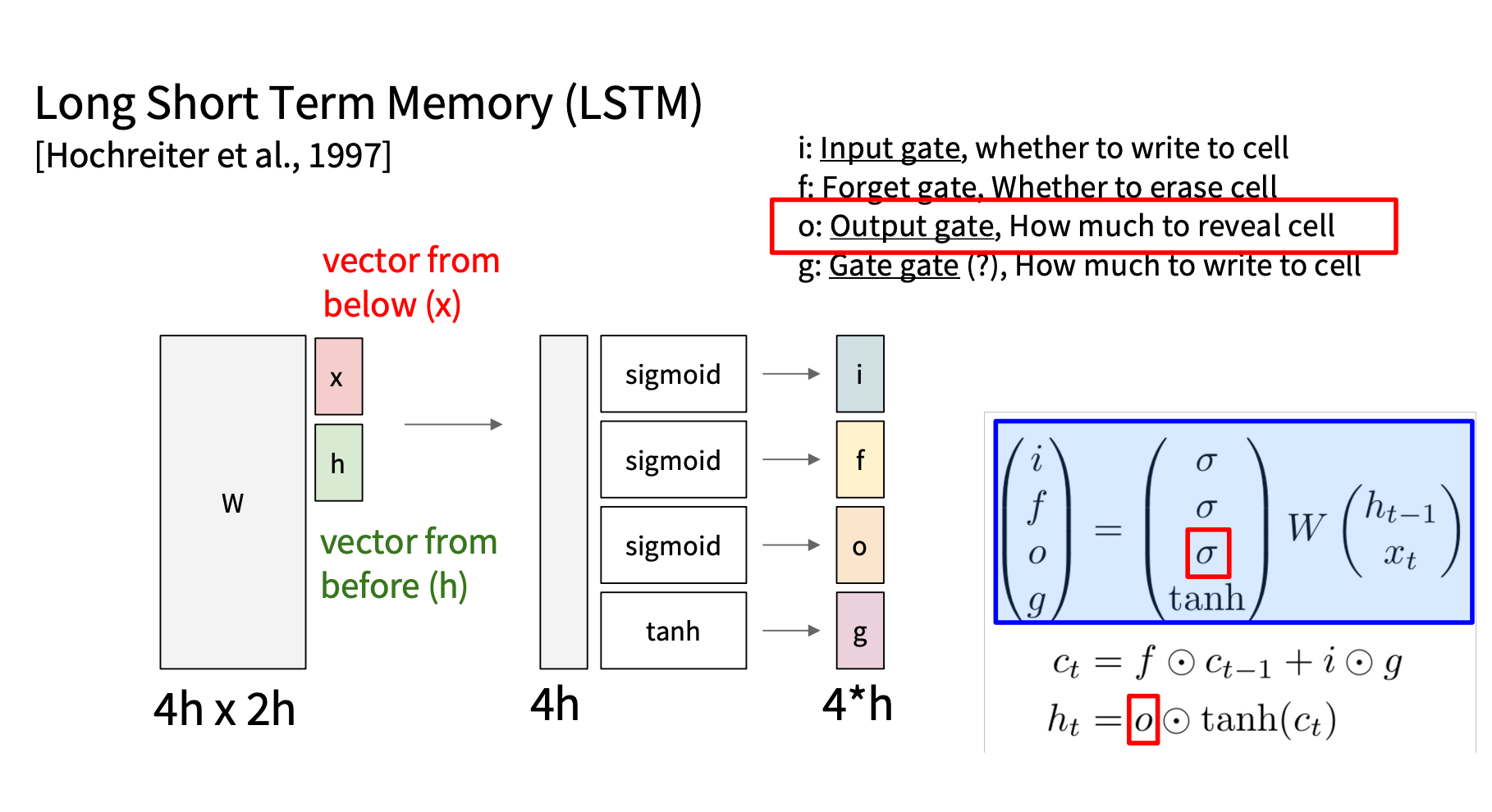
四个门控制机制


LSTM 通过门控机制控制信息的流动,包括:
| 门名称 | 作用 | 激活函数 | 数学表达式 |
|---|---|---|---|
| 遗忘门 ft | 控制保留多少旧记忆 ct − 1 | sigmoid | ft = σ(Whfht − 1 + Wxfxt) |
| 输入门 it | 控制写入多少新信息 | sigmoid | it = σ(Whiht − 1 + Wxixt) |
| 候选值 gt | 新信息候选值 | tanh | gt = tanh (Whght − 1 + Wxgxt) |
| 输出门 ot | 控制是否输出当前记忆 | sigmoid | ot = σ(Whoht − 1 + Wxoxt) |
并行化计算
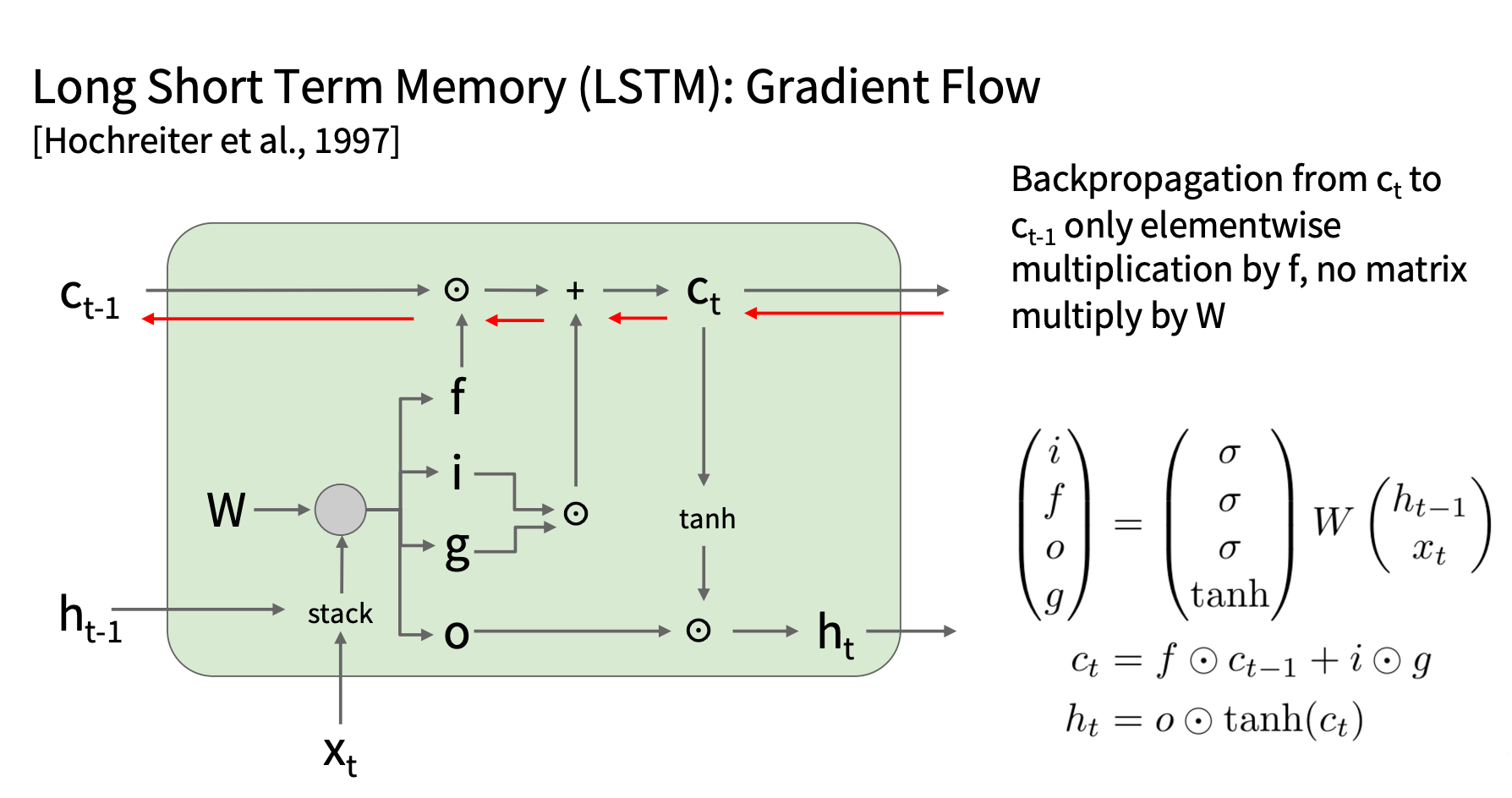
3. 细胞状态更新
ct = ft ⊙ ct − 1 + it ⊙ gt
- 过去的信息 ct − 1 乘以遗忘门 ft ,决定哪些部分保留。
- 新的信息 gt 乘以输入门 it ,决定哪些部分加入细胞状态。
4. 计算隐藏状态
ht = ot ⊙ tanh (ct)
- 细胞状态 ct 经过 tanh 变换,使得数值限制在 [-1,1] 之间。
- 乘以输出门 ot 决定是否输出该信息。
代码演示
注意每一步其实是有多个 cell 并行处理,最后将结果拼接
1 | |
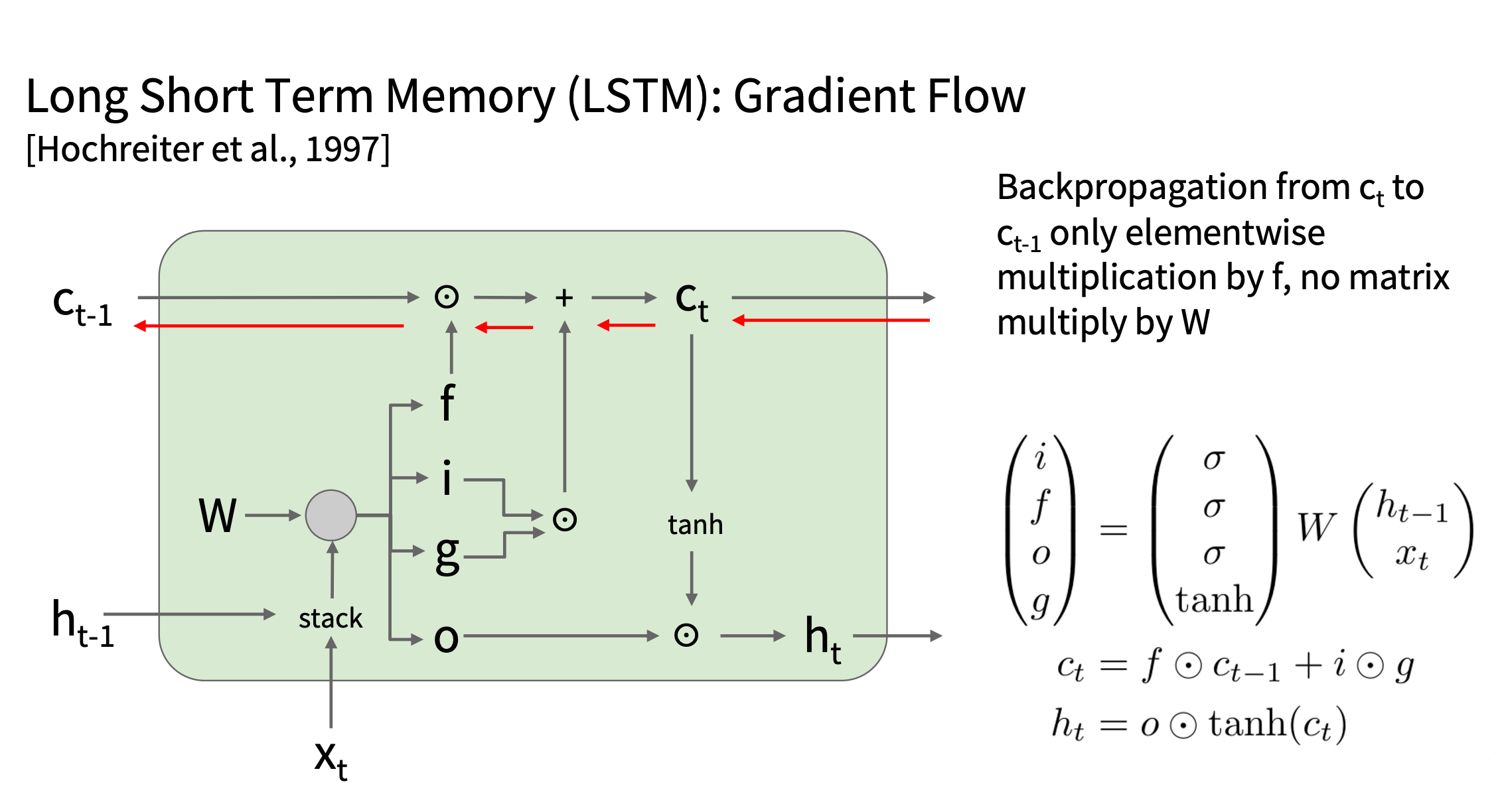
LSTM 反向传播的优势
用Element-wise Multiplication 的乘法
| 矩阵乘法 y = Wx | 元素乘法 y = f ⊙ x | |
|---|---|---|
| 计算复杂度 | 需要 O(n^2) 的计算量 | 只需要 O(n) |
| 梯度传播 | 可能导致梯度爆炸或消失(取决于 W 的最大奇异值) | 梯度稳定(仅在 0-1 范围内缩放) |
| 数学性质 | 可能会产生长距离的依赖不稳定 | 保持梯度方向一致,更稳定 |
梯度流
- 损失 L 首先反向传播到隐藏状态 ht
- 再通过 ht 传递到细胞状态ct
- 通过细胞状态 ct 传递到各个门(输入门 it 、遗忘门 ft 、输出门 ot 、候选状态 gt )
- 梯度最终回传到 W,因为门的计算公式中包含 W
梯度传播的公式:
由于每个时间步都要计算这个梯度,并进行 累加,时间步数越多,梯度的累积计算就越多。
LSTM 如何用元素乘法解决梯度问题
在 LSTM 中,细胞状态的更新方式是:
ct = ft ⊙ ct − 1 + it ⊙ gt
其中:
- ft (遗忘门)控制旧信息的保留,其值在 0 到 1 之间。
- it (输入门)决定是否加入新信息。
在反向传播时:
LSTM 更稳定原因?
- LSTM 允许梯度缓慢衰减
- 在 RNN 里,梯度指数级衰减(每一步都乘 Wh 和 1 − tanh2(ht) )。
- 在 LSTM 里,梯度只是缓慢乘以 ft 。
- 遗忘门ft 由数据学习
- LSTM 不是固定的ft ,而是可以学习最优的 ft 。
- 如果模型检测到需要长期记忆, ft 会自动接近 1,使得梯度可以长时间传播。
- 在重要的信息上,LSTM 可以动态调整 ft ,确保梯度不会过早消失。
- LSTM 允许梯度选择性地消失
- 有些信息应该被遗忘,而有些信息应该长期存储。
- LSTM 通过 ft 控制哪些信息应该被保留,哪些可以丢弃。
- 这比 RNN 全局性梯度消失/爆炸的情况更合理。
- 细胞状态不经过 tanh
- 在 RNN 里,梯度在每个时间步都要乘 1 − tanh2(ht) ,导致指数级衰减。
- 在 LSTM 里,细胞状态梯度传播时不经过 tanh,减少了梯度衰减。
LSTM 和ResNet 的相似性
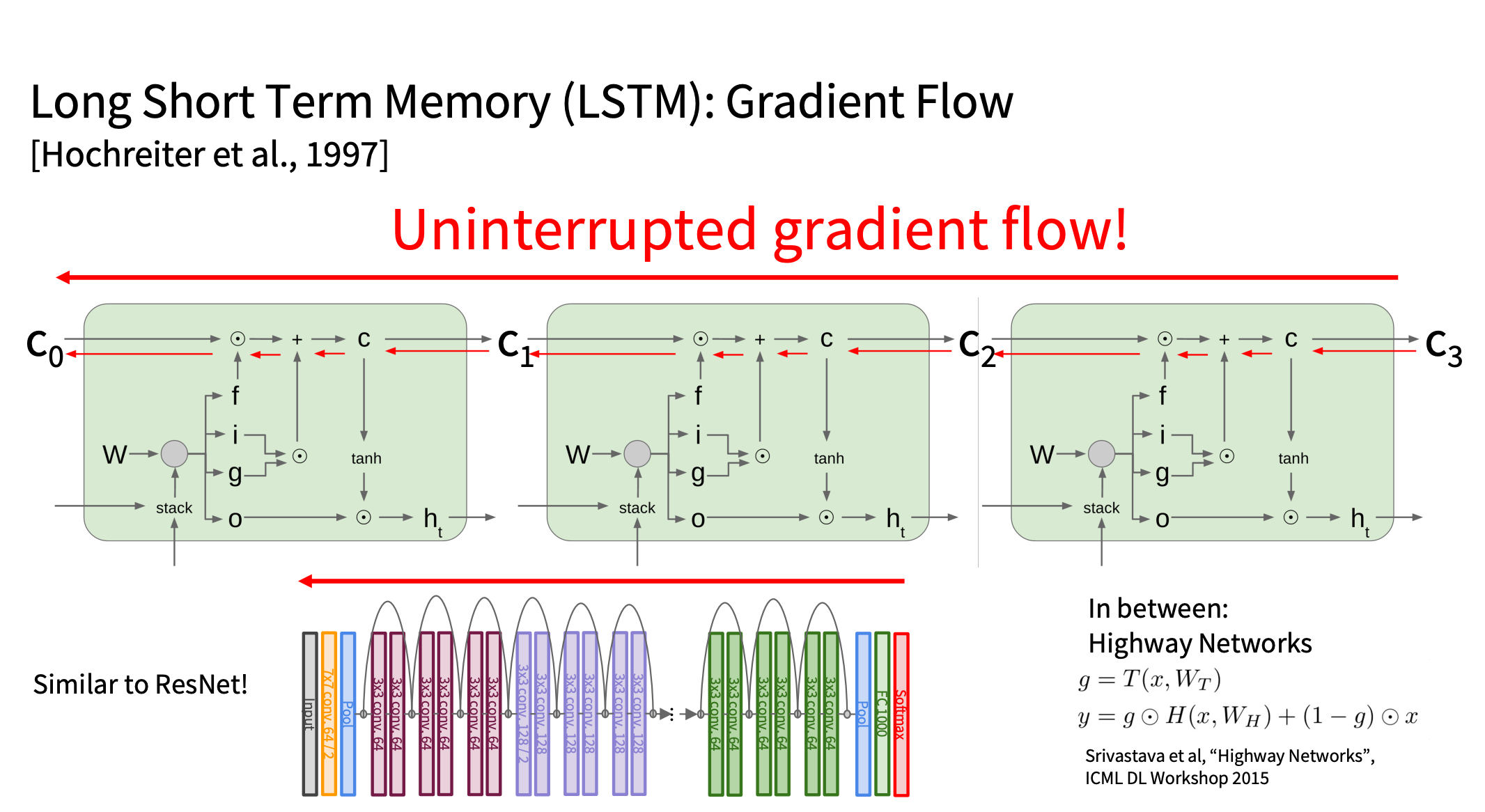
- LSTM 通过细胞状态 ct 形成“梯度高速公路”,类似于 ResNet 的残差连接(skip connection)。
- 高速公路网络(Highway Networks)是介于 LSTM 和 ResNet 之间的一种模型,它结合了门控机制和残差思想。
- 深度 CNN 和深度 RNN 在训练时面临相似的问题,许多架构设计的灵感可以相互借鉴。
1. LSTM 和 ResNet 的梯度高速公路
在深度网络(无论是 CNN 还是 RNN)中,一个主要挑战是 梯度消失。两种方法都使用了跳跃连接(Skip Connection) 来缓解这个问题:
(1) ResNet 的残差连接
ResNet 解决梯度消失的关键思想是 引入身份连接(Identity Connection):
y = F(x) + x
其中:
- F(x) 是普通的 CNN 层(例如卷积 + ReLU)。
- 残差连接 + x 确保梯度可以直接从深层传播回前面,不会过度衰减。
- 梯度不会完全依赖于 F(x) 的计算,因此即使 F(x) 计算出一个接近 0 的梯度,x 仍然能保证信息流动。
梯度计算(反向传播):
这意味着,即使
(2) LSTM 的细胞状态
LSTM 也有一个类似的 “身份连接”,即:
ct = ft ⊙ ct − 1 + it ⊙ gt
在反向传播时:
- 类似 ResNet 的跳跃连接,LSTM 允许梯度绕过 tanh 等非线性变换,直接传播到前面的时间步。
- 如果 ft ≈ 1 ,梯度可以很好地保持,防止梯度消失。
- 这种梯度“高速公路”让 LSTM 在长时间依赖任务上表现比 RNN 好很多。
- ResNet 通过残差连接确保 CNN 层的梯度可以稳定传播。
- LSTM 通过细胞状态 ct 提供了一条直接的梯度通道,确保梯度不会完全消失。
- 两者都用到了“梯度高速公路”这一核心思想。
补充: 高速公路网络(Highway Networks)
在 LSTM 和 ResNet 之间,还有一个早期的概念叫 高速公路网络(Highway Networks),它借鉴了 LSTM 的门控机制,并将其应用到 CNN 里。
(1) 高速公路网络的公式
高速公路网络的核心公式:
y = T(x) ⊙ F(x) + (1 − T(x)) ⊙ x
其中:
- F(x) 是普通的神经网络层(例如卷积层)。
- T(x) 是一个门控机制(通常是 sigmoid 函数),决定当前层的输出应该来自于 F(x) 还是直接跳过并使用 x。
如果 T(x) = 1,则:
y = F(x)
如果 T(x) = 0,则:
y = x
这意味着:
- 如果网络需要保留原始信息,就可以让 T(x) 变小,相当于一个跳跃连接。
- 如果网络需要计算更复杂的特征,就让 T(x) 变大,使 F(x) 生效。
梯度计算:
• 这意味着,即使 F(x) 计算出的梯度很小,梯度仍然可以通过 x 直接回传,减少梯度消失问题。
高速公路网络
• 结合了 LSTM 的门控机制(T(x))和 ResNet 的跳跃连接(+ x)。
• 允许网络动态决定是否应该让信息直接传播,或者应该进行更复杂的计算。
• 高速公路网络的思想后来被用于 ResNet,成为深度 CNN 的关键技术。
| 架构 | 关键思想 | 梯度如何传播? |
|---|---|---|
| RNN | 隐藏状态 ht 通过 Wh 传播 | 梯度容易消失(因为每步乘 Wh 和 tanh ) |
| LSTM | 细胞状态 ct 提供梯度高速公路 | 梯度不会指数级消失(因为 ct 主要通过 ft 传播) |
| ResNet | 残差连接 y = F(x) + x | 梯度可以直接传播回前层,不会衰减 |
| Highway Networks | 门控连接 y = T(x) ⊙ F(x) + (1 − T(x)) ⊙ x | 结合 LSTM 门控机制 + ResNet 的跳跃连接 |
RNN 可解释性研究
原始论文[1506.02078] Visualizing and Understanding Recurrent Networks
背景 : RNN 内部工作机制难以解释
RNN 通过隐藏状态向量(hidden state vector)存储序列信息,每个时间步都会更新隐藏状态。这些向量中的每个元素(cell)可能在学习过程中捕捉到不同的信息。但RNN 的隐藏状态是一个高维向量,通常难以解释: - 大多数隐藏状态的变化看起来像“随机噪声”。 - 但部分单元可能学习到了有意义的模式,比如识别引号、计算行长度、跟踪代码结构等。
实验设计
- 分了三组相互对照组: VanillaRNN, LSTM,GRU
- 字符级语言模型建模: 方便对神经元进行分析
- 数据集: 战争与和平纯语言数据集以及 Linux 内核源码以测试在不同结构性文本的范化及长建模能
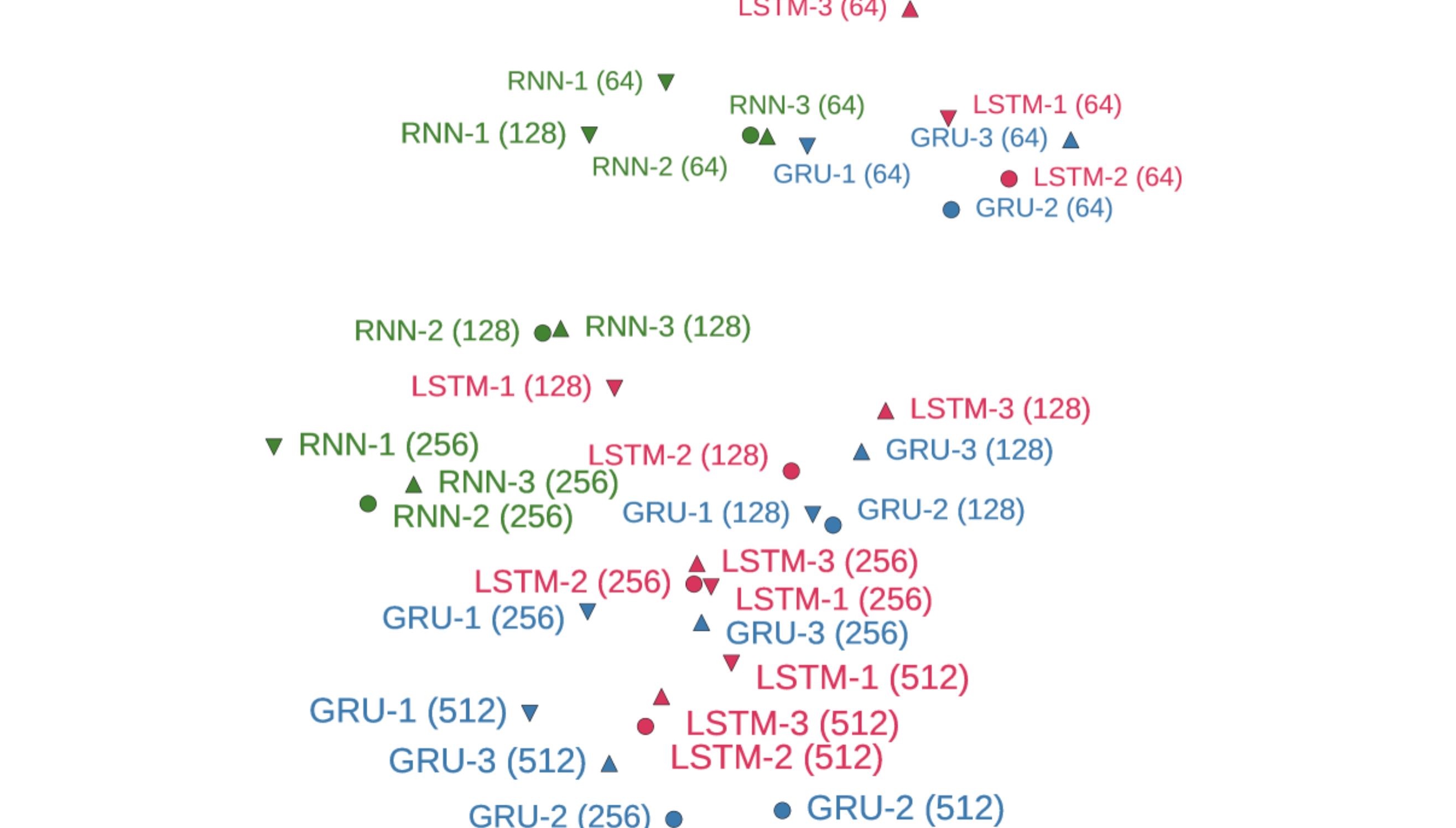
三组比较
- 从交叉熵损失来看,LSTM 和 GRU 由于RNN
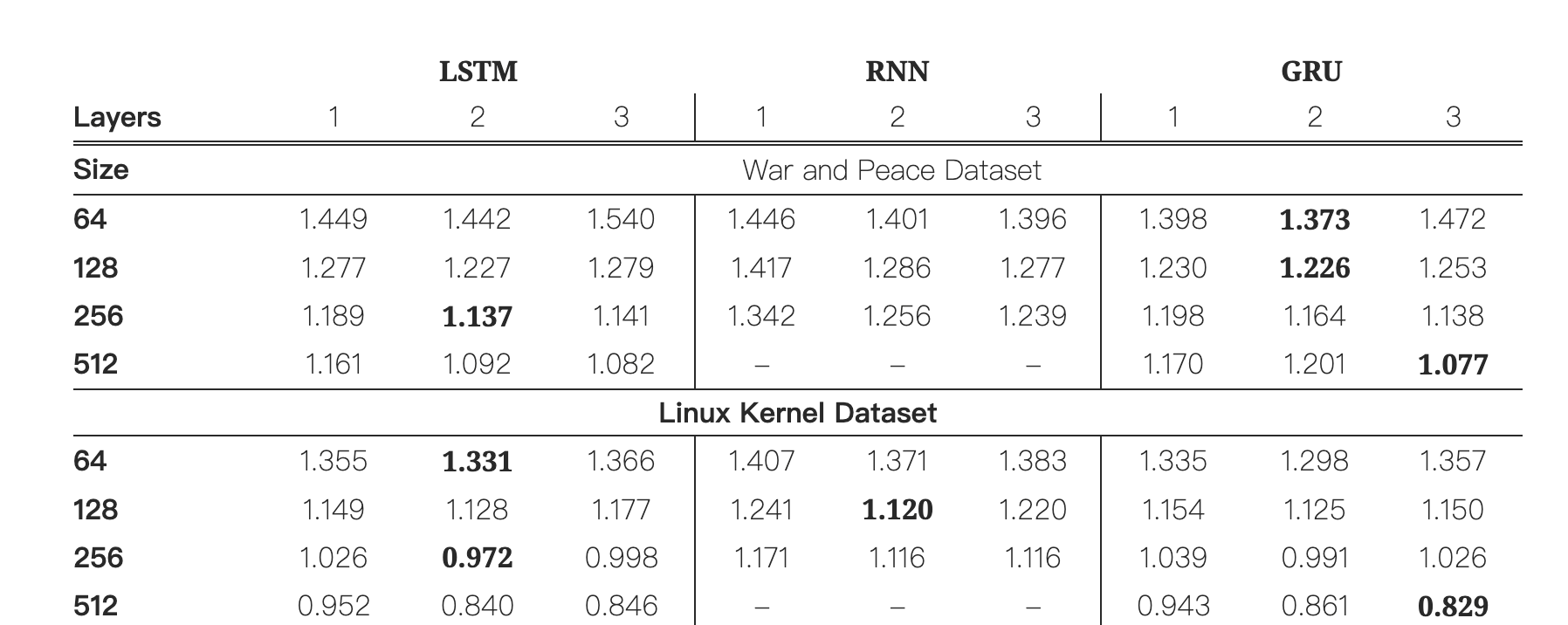
- 从 t-SNE 可视化来看:LSTM 和 GRU 聚在了一起,说明预测模式相似。而 RNN 则形成相对独立的簇。
LSTM 内部原理可视化
可解释的长距离 LSTM 单元 (Interpretable, long-range LSTM cells)
- 利用字符级语言模型的优势,每个时间步每输入一个字符,LSTM 都会更新内部状态,便于观察神经元响应 (准确说是选择每个时间步可解释 cell 来分析)
- 字符粒度细,可以精准捕捉语法、结构等细节依赖关系。
- 遍历了所有 Cell 的激活情况,在大量 Cell 中挑选出那些表现出“明显模式”的 Cell 来进行展示。
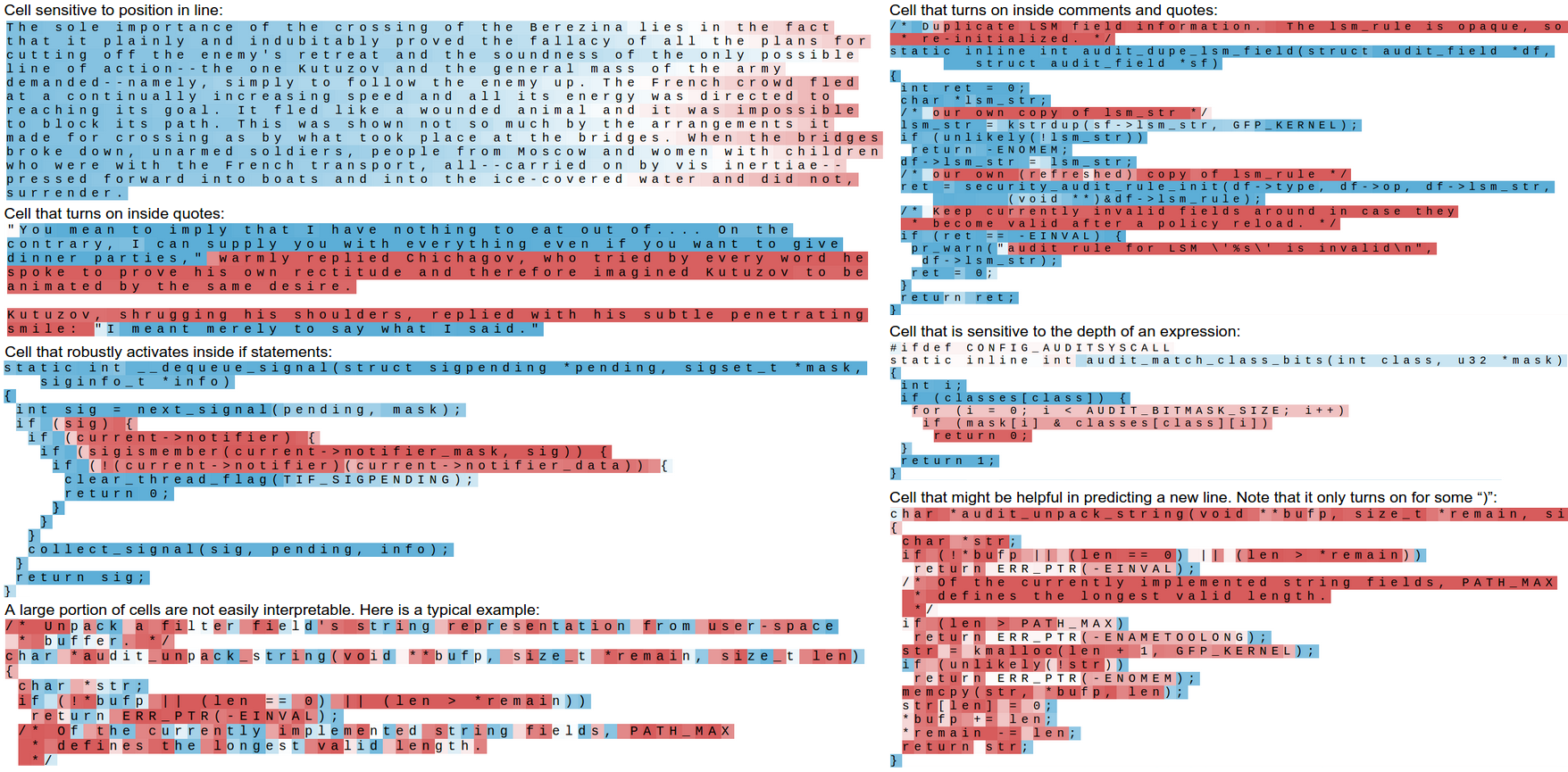
Figure 2:Several examples of cells with interpretable activations discovered in our best Linux Kernel and War and Peace LSTMs. Text color corresponds to tanh(c), where -1 is red and +1 is blue.
门控激活统计分析(Gate Activation Statistics)
- 将激活值分为左饱和(<0.1)及右饱和 (>0.9)
- 分 layer可视化所有 gate (注意梳理层级关系:一个 LSTM 网络可有若干层,每一层为一个完整的 LSTM 结构,每一个 LSTM 结构有很多 cell, 由hidden_size 决定,每一个时间步输入会输入到每一层的所有 Cell 中,所有 Cell 同时更新状态和门控)
- N 个时间步 × M 个 Cell × 各种 Gate中会产生海量的动态行为, 统计的是比例, 即对每个 Cell 的某个 Gate,计算在所有时间步中,有多少比例时间是 Left Saturated,有多少比例时间是 Right Saturated。
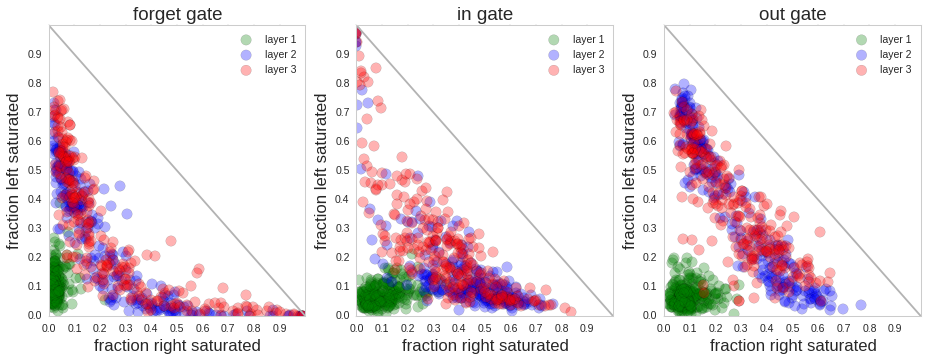
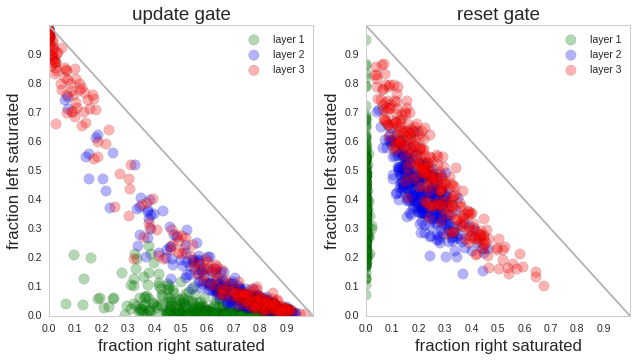
Figure 3: Left three: Saturation plots for an LSTM. Each circle is a gate in the LSTM and its position is determined by the fraction of time it is left or right-saturated. These fractions must add to at most one (indicated by the diagonal line). Right two: Saturation plot for a 3-layer GRU model.
结果分析
- 如果一个点接近右下角:说明这个 Cell 的 Gate 经常完全打开。
- 如果一个点接近左上角:说明这个 Gate 经常完全关闭。
- 如果点分布在中间:说明这个 Gate 经常处于动态调节状态。
- 比如第一层的 gate 经常分布在右下角,则既不常开,也不常关,更多是在做灵活的特征处理,像前馈网络一样动态响应输入。
- Forget Gate很多点集中在右下角,说明部分 Cell 长时间保持记忆(不遗忘)。
- Input Gate & Output Gate:分布更分散,说明输入和输出是动态调节的。
- Update Gate:高层(红色)经常接近饱和,说明更新机制趋向二元化(要么更新,要么保持)。
Understanding Long-Range Interactions
这里想要验证假设: Good performance of LSTMs is frequently attributed to their ability to store long-range information
实验设计及结果分析
- 对比 LSTM, n-NN(n-gram Neural Network) 和 n-gram 语言模型
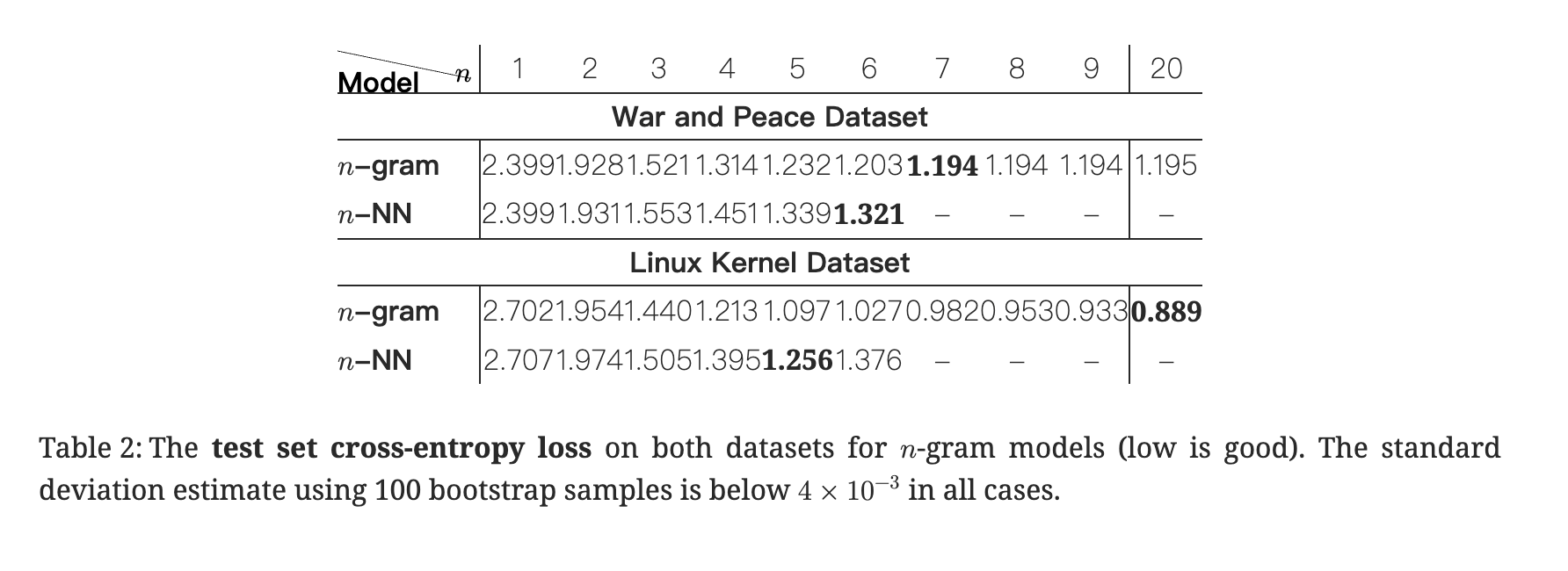 这里显示小 n 时(n=1~3),n-gram 和 n-NN
表现接近。随着 n 增大:n-gram
模型效果更好,因为统计模型善于记忆短期模式。n-NN
容易过拟合,性能下降。
这里显示小 n 时(n=1~3),n-gram 和 n-NN
表现接近。随着 n 增大:n-gram
模型效果更好,因为统计模型善于记忆短期模式。n-NN
容易过拟合,性能下降。
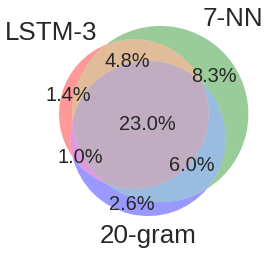
这里显示错误重叠的韦恩图: 对比 LSTM-3、7-NN 和 20-gram 模型在测试集上的错误重叠情况。中间 23%:三者都错的部分。说明不同模型在不同类型的错误上表现不同,LSTM 能避免一些特定错误。这三个模型共享大部分错误率,但每个模型也都有自己独特的错误率
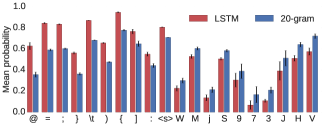
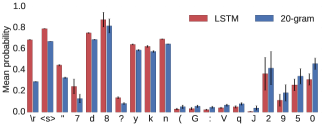
这里显示字符级别的正确率对比: 纵轴:模型给正确字符分配的平均概率。结果:LSTM 在需要长距离推理的特殊字符上表现明显优于 20-gram,比如:空格 、括号、引号、缩进符号、特殊标点等。这些字符往往依赖于上下文的结构性。
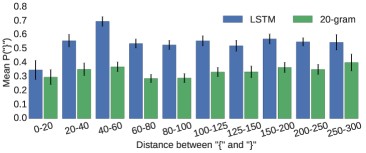
当距离 ≤ 20 时:LSTM 和 20-gram 差距不大(因为 20-gram 刚好还能“看到”开括号)。 当距离 > 20 后:20-gram 性能基本不变,处于“盲猜”水平,因为它看不到对应的开括号。LSTM 表现明显优于 20-gram,说明它能“记住”更远处的开括号信息。 随着距离进一步拉长,LSTM 的优势逐渐减弱,毕竟模型的记忆能力也有限。
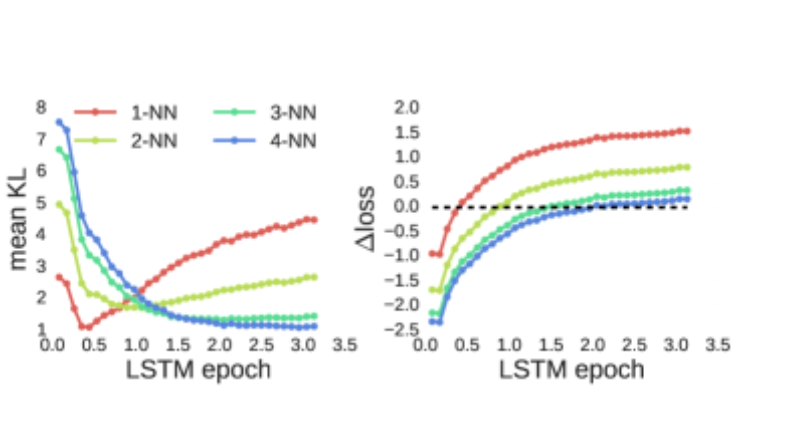
这里绘制 KL散度和平均损失的差异 最初几次迭代中,LSTM 的行为类似于 1-NN 模型,但随后不久就与之偏离。然后,LSTM 的行为依次更像 2-NN、3-NN 和 4-NN 模型。该实验表明,在训练过程中,LSTM 会“增强”其对越来越长的依赖关系的能力
Breaking Down the Failure Cases
这里分类了 LSTM 多错误
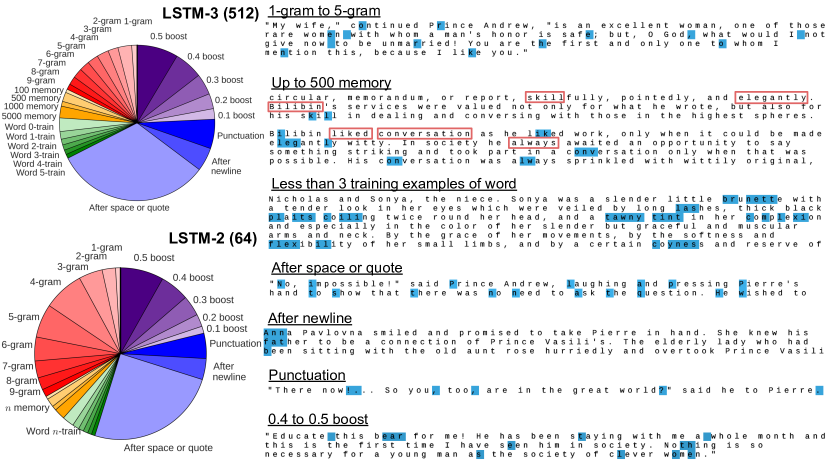
这里显示大模型错误更少,n-gram 类错误占比大;小模型错误更多,boost (无明显特征的残余错误)部分比例明显 但仅仅通过简单堆参数,只能改变 n-gram 类的问题,深层次的错误几乎不受影响,所以需要从架构上进行创新